Space News & Blog Articles
Japanese company aims to become first company to land on the moon Tuesday
 The Hakuto-R lunar lander captured this view of Earthrise from an altitude of about 60 miles (100 kilometers) above the lunar surface. Credit: ispace
The Hakuto-R lunar lander captured this view of Earthrise from an altitude of about 60 miles (100 kilometers) above the lunar surface. Credit: ispace
The Japanese company ispace could become the first commercial firm to achieve a controlled landing on the moon Tuesday, when its privately-funded Hakuto-R lander attempts to touch down inside a crater to deliver a small Emirati rover and other research payloads to the lunar surface.
The Hakuto-R lander will begin an hour-long descent sequence at 11:40 a.m. EDT (1540 UTC) Tuesday, when it will drop out of its 60-mile-high (100-kilometer) orbit around the moon and begin a series of propulsive maneuvers to target a landing zone inside Atlas crater, a 54-mile-high (87-kilometer) impact basin on the northeastern quadrant of the near side of the moon.
If all goes according to plan, the history-making autonomous landing is scheduled around 12:40 p.m. EDT (1640 UTC).
The Hakuto-R lander is about the size of a compact car, with four landing legs that extended soon after a successful launch Dec. 11 from Cape Canaveral aboard a SpaceX Falcon 9 rocket. The four-and-a-half month journey from the Florida launch base has included multiple engine firings, first to boost ispace’s Hakuto-R lander out of Earth orbit toward the moon, then to guide the spacecraft toward an intercept with the moon last month.
The spacecraft took a longer but more fuel efficient route to the moon than the direct trajectory followed by NASA’s Apollo missions or the Orion spacecraft in the U.S.-led Artemis program. The Hakuto-R lander, which ispace calls its “Series 1” design, reached a distance of 855,000 miles (nearly 1.38 million miles) from Earth in February, becoming the farthest privately-funded, commercially-operated spacecraft in history.
The solar-powered spacecraft was then pulled back toward the moon by gravitational forces, and then Hakuto-R performed another engine burn March 21 to be captured into lunar orbit. Another 10-minute engine firing April 13 steered the spacecraft into a circular 60-mile-high orbit around the moon, setting up for the landing attempt Tuesday.
About two-thirds of the lander’s launch mass was hydrazine and nitrogen tetroxide propellants to feed Hakuto-R’s engines. The dry mass of the spacecraft is about 750 pounds (340 kilograms). With its legs extended, the lander stands 7.5 feet (2.3 meters) tall and 8.5 feet (2.6 meters) wide.
“What we have accomplished so far is already a great achievement, and we are already applying lessons learned from this flight to our future missions,” said Takeshi Hakamada, founder and CEO of ispace. “I would like to once again express my heartfelt thanks to those who have worked so hard on this mission, including the engineers who are carrying out the long-term operations since our launch back in December. The stage is set. I am looking forward to witnessing this historic day, marking the beginning of a new era of commercial lunar missions.”
Engineers at a mission operations center in Tokyo will oversee Hakuto-R’s final decent to the lunar surface, but the spacecraft will perform the final descent maneuvers on its own.
The lander’s propulsion system, provided by the European aerospace company ArianeGroup, consists of a main engine to provide most of the thrust needed to slow for landing. There are six smaller “assist” thrusters clustered around the main engine, providing pulses for additional deceleration. Eight reaction control system thrusters provide pointing control for the the spacecraft.
The thrusters will ignite for a braking maneuver to slow the spacecraft’s velocity enough to drop out of its orbit around the moon. Closer to the surface, the lander will perform a pitch-up maneuver to point its main engine toward the moon, followed by a final descent phase to guide toward the landing site in Atlas crater. Shock absorbers on the four landing legs will help cushion the final touchdown.
Guidance, navigation, and control software developed by Massachusetts-based Draper will control the Hakuto-R spacecraft’s automated landing sequence. The lander’s solar panels were supplied by Colorado-based Sierra Space.
 This illustration shows the Hakuto-R lander’s sequence to ascent to the lunar surface. Credit: ispace
This illustration shows the Hakuto-R lander’s sequence to ascent to the lunar surface. Credit: ispace
Assuming the landing is successful, the spacecraft is designed to operate for about 10 days after touchdown, long enough to deploy the two mobile payloads from the United Arab Emirates and Japan. The stationary landing craft will relay communications signals from the deployable payloads back to Earth. The mission will end when sun sets on the landing site to begin the two-week-long lunar night.
The Hakuto-R lander carries about 24 pounds (11 kilograms) of customer payloads. By far, the largest of the payloads is a rover from the United Arab Emirates developed by the Mohammed Bin Rashid Space Center. While the rover takes up most of the Hakuto-R lander’s payload capacity, it is still small in stature, measuring just 21 inches by 21 inches (53-by-53 centimeters).
The UAE’s moon rover, named Rashid, weighs about 22 pounds (10 kilograms) in Earth’s gravity. The rover is scheduled to roll off the Hakuto-R spacecraft a couple of days after landing, then will survey the landing site with a pair of French cameras, and microscopic and thermal imagers to study rocks and soils. The rover has two Langmuir probes to measure the plasma environment at the moon, which can lift dust particles and transport them across the lunar surface.
Engineers also embedded small samples of different materials on the rover’s four wheels, part of a technology experiment to evaluate how well the materials withstand the abrasive rock and dust on the moon.
“The samples have been bonded to the outside of the rover’s magnesium alloy wheels,” said Ugo Lafont, a materials engineer at the European Space Agency, which provided four of the material samples for the Rashid rover’s wheels. “The rover’s high-resolution camera will inspect the sample panels over time, so we will be able to observe the incidence of factors such as abrasion, discoloration and whether dust stays stuck to the samples or not.”
The Hakuto-R lander is also hauling an even smaller mobile robot developed by the Japan Aerospace Exploration Agency and the Japanese toy company Tomy. The so-called transformable lunar robot weighs just a half-pound (250 grams) and is some 3 inches (80 millimeters) wide before it deploys tiny wheels to roll across the lunar surface and collect data and imagery to aid in the design of a future pressurized rover to transport astronauts on the moon.
A payload from NGK Spark Plug, another Japanese company, will test the performance of solid-state batteries. The Hakuto-R landing craft also has payloads from three Canadian companies: A 360-degree imaging system from Canadensys, an artificial intelligence flight computer from Mission Control Space Services, and a demonstration for NGC Aerospace’s crater-based autonomous navigation system.
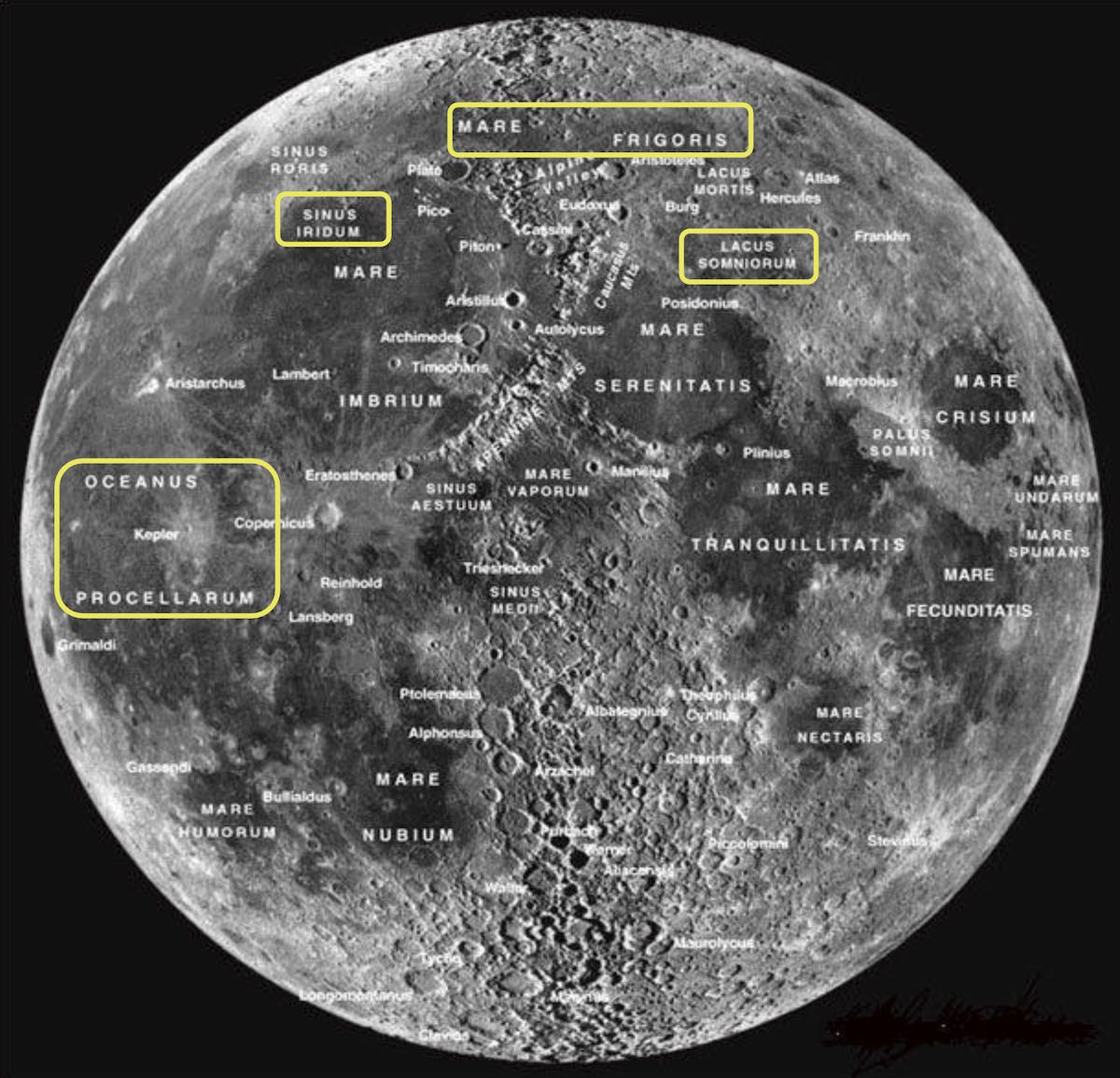 The primary landing site for ispace’s first lunar lander is Atlas crater, located on the southeastern edge of Mare Frigoris, or the Sea of Cold, on the near side of the moon. This region is located at the top-center of this map. Backup landing regions are also labeled. Credit: ispace
The primary landing site for ispace’s first lunar lander is Atlas crater, located on the southeastern edge of Mare Frigoris, or the Sea of Cold, on the near side of the moon. This region is located at the top-center of this map. Backup landing regions are also labeled. Credit: ispace
First, ispace’s lander has to reach the moon’s surface. Government-led missions from the United States, the Soviet Union, and China have landed on the moon, but ispace is using a commercial business model.
Aside from the payloads mounted on the lander, ispace aims to fulfill a contract with NASA with the first Hakuto-R mission. NASA awarded contracts in 2020 to purchase lunar regolith from commercial companies, including a $5,000 deal to ispace. All of the agreements were relatively low in monetary value.
The initiative is part of NASA’s Artemis moon program. NASA wants to eventually contract with commercial companies to acquire resources, such as minerals and water, that could sustain a future moon base. The transfer of ownership of lunar soil from a private company to NASA will help officials on both sides of the transaction sort through legal and regulatory issues.
“It’s only the conceptual transfer of ownership,” Hakamada said in an interview with Spaceflight Now last year.
Bits of dust kicked up by the landing engine are expected to settle on the footpads of the lander’s legs.
“The regolith will come in and cover the pad, and we declare the capture of the lunar regolith, and then transfer the ownership of the regolith on this pad. We don’t move this regolith somewhere else, we don’t expect that for this first mission.”
Hakamada said ispace has a second contract to sell lunar regolith to NASA on the company’s next lunar landing mission, scheduled for 2024. On that mission, ispace may attempt to scoop up some soil from the lunar surface.
While the first Hakuto-R Series 1 lander is a purely commercial mission, ispace is working with Draper and other space companies to develop a larger robotic moon lander to transport up to a half-ton of cargo to the moon for NASA. Draper and ispace won a NASA Commercial Lunar Payload Services, or CLPS, contract last year to deliver multiple NASA science instruments to the moon’s surface in 2025.
NASA’s first two CLPS missions will be flown by Astrobotic and Intuitive Machines. Both of those companies plan to launch their first privately-developed moon landers later this year.
 The Hakuto-R moon lander launched Dec. 11 from Cape Canaveral aboard a SpaceX Falcon 9 rocket. Credit: Stephen Clark / Spaceflight Now
The Hakuto-R moon lander launched Dec. 11 from Cape Canaveral aboard a SpaceX Falcon 9 rocket. Credit: Stephen Clark / Spaceflight Now
“Our mission is privately funded,” Hakamada said. “However, we have some relationships with governments, like our payload from the UAE Space Agency and MBRSC, and we also have a JAXA payload as well. But even these payloads are commercial contracts, with no R&D funding from the government, so totally different than the past engagement with the government.”
Hakamada’s investors include Suzuki, Japan Airlines, the Development Bank of Japan, Konica Minolta, Dentsu, and numerous venture capital and equity funds.
The ispace moon lander mission is the culmination of 12 years of engineering development and fundraising, an effort that included starts, stops, and wholesale changes in scope.
The Google Lunar X Prize, the sweepstakes that offered a $20 million grand prize to the first privately-funded team to put a lander on the moon, was the original impetus for Hakamada to establish the company that eventually became ispace. Hakamada’s group, called Hakuto, worked on designing a lunar rover to ride to the moon on another lander. But the Google Lunar X Prize shut down in 2018 without a winner, leading some of the teams to dissolve or struggle to find new purpose.
Hakamada redirected ispace’s efforts to design and develop its own moon lander, a reboot the firm calls Hakuto-R. Hakuto means “white rabbit” in Japanese.
Now boasting a staff of more than 200 employees, ispace said last year it had secured $237 million in equity financing and bank loans to pay for the Hakuto-R lunar transportation program, although ispace has not disclosed the standalone cost of the first mission. The company says it “specializes in designing and building lunar landers and rovers.”
The goal of ispace is to “extend the sphere of human life into space and create a sustainable world by providing high-frequency, low-cost transportation services to the moon,” according to the company’s website.
This email address is being protected from spambots. You need JavaScript enabled to view it. the author.
Follow Stephen Clark on Twitter: @StephenClark1.
When you subscribe to the SpaceZE News Feed, we will send you an e-mail when there are new updates on the site so you wouldn't miss them.